W matematyce , prostopadłe współrzędne są określone jako zestaw d współrzędnych P = ( Q 1 , Q 2 , ..., Q d ), w którym koordynuje powierzchnie Dostarczana pod kątem prostym (uwaga: Indeksy górne są wskaźniki nie wykładniki). Powierzchnia współrzędnych dla określonej współrzędnej q k jest krzywą, powierzchnią lub hiperpowierzchnią, na której q k jest stałą. Na przykład trójwymiarowe współrzędne kartezjańskie ( x , y , z ) są ortogonalnym układem współrzędnych, ponieważ ich powierzchnie współrzędnych x = stała, y = stała i z = stała są płaszczyznami, które spotykają się ze sobą pod kątem prostym, tj. , są prostopadłe. Współrzędne ortogonalne są szczególnym, ale niezwykle powszechnym przypadkiem współrzędnych krzywoliniowych .
Motywacja
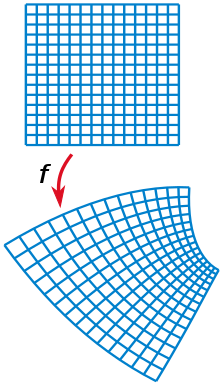
Mapa
konforemna działająca na siatce prostokątnej. Zauważ, że zachowana jest ortogonalność zakrzywionej siatki.
Podczas gdy operacje wektorowe i prawa fizyczne są zwykle najłatwiejsze do wyprowadzenia we współrzędnych kartezjańskich , współrzędne ortogonalne niekartezjańskie są często używane zamiast tego do rozwiązywania różnych problemów, zwłaszcza problemów z wartościami brzegowymi , takich jak te powstające w teoriach pola mechaniki kwantowej , przepływ płynów , elektrodynamika , fizyka plazmy i dyfuzja związków chemicznych lub ciepła .
Główną zaletą współrzędnych niekartezjańskich jest to, że można je dobrać tak, aby odpowiadały symetrii problemu. Na przykład fala ciśnienia spowodowana eksplozją daleko od ziemi (lub innych barier) zależy od przestrzeni 3D we współrzędnych kartezjańskich, jednak ciśnienie głównie oddala się od środka, tak że we współrzędnych sferycznych problem staje się bardzo prawie jednowymiarowy (ponieważ fala ciśnienia zależy głównie od czasu i odległości od środka). Innym przykładem jest (powolny) płyn w prostej okrągłej rurze: we współrzędnych kartezjańskich należy rozwiązać (trudny) dwuwymiarowy problem wartości brzegowych obejmujący równanie różniczkowe cząstkowe, ale we współrzędnych cylindrycznych problem staje się jednowymiarowy ze zwykłą różniczką równanie zamiast równania różniczkowego cząstkowego .
Powodem preferowania współrzędnych ortogonalnych zamiast ogólnych współrzędnych krzywoliniowych jest prostota: wiele komplikacji pojawia się, gdy współrzędne nie są ortogonalne. Na przykład we współrzędnych ortogonalnych wiele problemów można rozwiązać przez rozdzielenie zmiennych . Rozdzielenie zmiennych jest techniką matematyczny, który przetwarza złożone d wymiarową problemem w d problemów jednowymiarowych, które można rozwiązać w warunkach znanych funkcji. Wiele równań można zredukować do równania Laplace'a lub równania Helmholtza . Równanie Laplace'a można rozdzielić w 13 ortogonalnych układach współrzędnych (14 wymienionych w poniższej tabeli z wyjątkiem toroidalnego ), a równanie Helmholtza można rozdzielić w 11 ortogonalnych układach współrzędnych.
Współrzędne ortogonalne nigdy nie mają terminów poza przekątną w tensorze metrycznym . Innymi słowy, nieskończenie mała do kwadratu odległość ds 2 zawsze może być zapisana jako przeskalowana suma nieskończenie małych do kwadratu przemieszczeń współrzędnych

gdzie d jest wymiarem i funkcjami skalowania (lub współczynnikami skali)

są równe pierwiastkom kwadratowym składowych diagonalnych tensora metrycznego lub długościom wektorów bazy lokalnej opisanych poniżej. Te funkcje skalowania H i są wykorzystywane do obliczania różnicy operatorów w nowe współrzędne, na przykład The gradientu The Laplace'a The dywergencja i zwijanie .

Prostą metodą generowania układów współrzędnych ortogonalnych w dwóch wymiarach jest mapowanie konforemne standardowej dwuwymiarowej siatki współrzędnych kartezjańskich ( x , y ) . Liczbę zespoloną z = x + Y można wytworzyć z rzeczywistych współrzędnych x i y , gdzie I oznacza jednostka urojona . Każda funkcja holomorficzna w = f ( z ) z niezerową pochodną zespoloną da mapowanie konforemne ; Jeśli uzyskana liczba kompleks opisana W = U + IV , a następnie z krzywych stałej u i v przecinają się pod kątem prostym, tak jak w oryginalnej linii ciągłej X i Y nie.
Współrzędne ortogonalne w trzech i wyższych wymiarach można wygenerować z ortogonalnego dwuwymiarowego układu współrzędnych, rzutując go na nowy wymiar ( współrzędne cylindryczne ) lub obracając układ dwuwymiarowy wokół jednej z jego osi symetrii. Istnieją jednak inne układy współrzędnych ortogonalnych w trzech wymiarach, których nie można uzyskać przez rzutowanie lub obracanie układu dwuwymiarowego, takie jak współrzędne elipsoidalne . Bardziej ogólne współrzędne ortogonalne można uzyskać, zaczynając od niektórych niezbędnych powierzchni współrzędnych i uwzględniając ich ortogonalne trajektorie .
Wektory bazowe
Podstawa kowariancji
W kartezjańskim układzie współrzędnych , z wektorami bazowymi są stałe (stały). W bardziej ogólnym układzie współrzędnych krzywoliniowych punkt w przestrzeni jest określony przez współrzędne, a w każdym takim punkcie jest związany zbiór wektorów bazowych, które generalnie nie są stałe: jest to istota współrzędnych krzywoliniowych w ogóle i jest bardzo ważna koncepcja. Tym, co wyróżnia współrzędne ortogonalne, jest to, że chociaż wektory bazowe są różne, zawsze są względem siebie ortogonalne . Innymi słowy,

Te wektory bazowe są z definicji wektorami stycznymi krzywych otrzymanych przez zmianę jednej współrzędnej, przy utrzymaniu innych stałych:

Wizualizacja współrzędnych ortogonalnych 2D. Pokazane są krzywe uzyskane przez utrzymywanie wszystkich stałych współrzędnych oprócz jednej, wraz z wektorami bazowymi. Zauważ, że wektory bazowe nie mają jednakowej długości: nie muszą być, muszą być tylko ortogonalne.

gdzie r jest jakimś punktem, a q i współrzędną, dla której wyodrębniany jest wektor bazowy. Innymi słowy, krzywą uzyskuje się przez ustalenie wszystkich współrzędnych oprócz jednej; niestała współrzędna jest zróżnicowana jak w przypadku krzywej parametrycznej , a pochodna krzywej w odniesieniu do parametru (zmienna współrzędna) jest wektorem bazowym dla tej współrzędnej.
Zauważ, że wektory nie muszą mieć jednakowej długości. Przydatnymi funkcjami znanymi jako współczynniki skali współrzędnych są po prostu długości wektorów bazowych (patrz tabela poniżej). Współczynniki skali są czasami nazywane współczynnikami Lamé , nie należy ich mylić z parametrami Lamé (mechanika bryłowa) .


W znormalizowane wektory bazowe są zapisaną w cylinder i uzyskane przez podzielenie przez długość:

Pole wektorowe może być określone przez jego składowe w odniesieniu do wektorów bazowych lub znormalizowanych wektorów bazowych i trzeba mieć pewność, o który przypadek chodzi. Komponenty w znormalizowanej bazie są najczęściej stosowane w aplikacjach dla przejrzystości wielkości (na przykład można chcieć zajmować się prędkością styczną zamiast prędkości stycznej pomnożonej przez współczynnik skali); w wyprowadzeniach znormalizowana podstawa jest mniej powszechna, ponieważ jest bardziej skomplikowana.
Podstawa kontrawariantna
Bazowe wektory pokazane powyżej są kowariantnymi wektorami bazowymi (ponieważ „różnią się” z wektorami). W przypadku współrzędnych ortogonalnych kontrawariantne wektory bazowe są łatwe do znalezienia, ponieważ będą leżeć w tym samym kierunku co wektory kowariantne, ale o odwrotności długości (z tego powodu mówi się, że dwa zbiory wektorów bazowych są odwrotne względem siebie inny):

wynika to z faktu, że z definicji , używając delty Kroneckera . Zwróć uwagę, że:


Mamy teraz do czynienia z trzema różnymi bazami powszechnie używanymi do opisywania wektorów we współrzędnych ortogonalnych: kowariantna baza e i , kontrawariantna baza e i oraz znormalizowana baza ê i . Podczas gdy wektor jest wielkością obiektywną , co oznacza, że jego tożsamość jest niezależna od dowolnego układu współrzędnych, składowe wektora zależą od podstawy, w której wektor jest reprezentowany.
Aby uniknąć nieporozumień, składowe wektora x względem bazy e i przedstawiamy jako x i , natomiast składowe względem bazy e i przedstawiamy jako x i :

Pozycja indeksów reprezentuje sposób obliczania składowych (górnych indeksów nie należy mylić z potęgowaniem ). Zauważ, że symbole sumowania Σ (duża Sigma ) i zakres sumowania, wskazujący sumowanie po wszystkich wektorach bazowych ( i = 1, 2, ..., d ), są często pomijane . Komponenty są powiązane po prostu przez:

Nie ma rozróżniającej powszechnej notacji używanej dla składników wektorowych w odniesieniu do znormalizowanej podstawy; w tym artykule użyjemy indeksów dolnych dla komponentów wektora i zauważmy, że komponenty są obliczane na podstawie znormalizowanej.
Algebra wektorów
Dodawanie i negacja wektorów odbywa się z uwzględnieniem komponentów, tak jak we współrzędnych kartezjańskich, bez komplikacji. Dodatkowe uwagi mogą być konieczne w przypadku innych operacji na wektorach.
Zauważ jednak, że wszystkie te operacje zakładają, że dwa wektory w polu wektorowym są związane z tym samym punktem (innymi słowy, ogony wektorów pokrywają się). Ponieważ wektory bazowe generalnie różnią się współrzędnymi ortogonalnymi, jeśli doda się dwa wektory, których składowe są obliczane w różnych punktach przestrzeni, różne wektory bazowe wymagają rozważenia.
Produkt kropkowy
Produkt kropka w kartezjańskim układzie współrzędnych ( przestrzeni euklidesowej z ortonormalne Podstawa zestawu) jest po prostu sumą produktów składowych. We współrzędnych ortogonalnych iloczyn skalarny dwóch wektorów x i y przyjmuje tę znaną postać, gdy składowe wektorów są obliczane w znormalizowanej podstawie:

Jest to bezpośrednia konsekwencja faktu, że znormalizowana baza w pewnym momencie może tworzyć kartezjański układ współrzędnych: zbiór baz jest ortonormalny .
Dla składników w podstawach kowariantnych lub kontrawariantnych,

Można to łatwo uzyskać, wypisując wektory w postaci składowej, normalizując wektory bazowe i biorąc iloczyn skalarny. Na przykład w 2D:
![{\begin{wyrównany}{\mathbf x}\cdot {\mathbf y}&=\left(x^{1}{\mathbf e}_{1}+x^{2}{\mathbf e}_{ 2}\right)\cdot \left(y_{1}{\mathbf e}^{1}+y_{2}{\mathbf e}^{2}\right)\\[10pt]&=\left( x^{1}h_{1}{\kapelusz {{\mathbf e}}}_{1}+x^{2}h_{2}{\kapelusz {{\mathbf e}}}_{2}\ po prawej)\cdot \left(y_{1}{\frac {{\hat {{\mathbf e}}}^{1}}{h_{1}}}+y_{2}{\frac {{\hat {{\mathbf e}}}^{2}}{h_{2}}}\right)=x^{1}y_{1}+x^{2}y_{2}\end{wyrównany}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b967298ef8aa5d1b20f98c99698d74ed639bbcae)
gdzie zastosowano fakt, że znormalizowane podstawy kowariantne i kontrawariantne są równe.
Produkt krzyżowy
Produkt krzyż we współrzędnych kartezjańskich 3D jest:

Powyższy wzór pozostaje wtedy ważny we współrzędnych ortogonalnych, jeśli składowe są obliczane w znormalizowanej podstawie.
Aby skonstruować iloczyn krzyżowy we współrzędnych ortogonalnych z bazami kowariantnymi lub kontrawariantnymi, ponownie musimy po prostu znormalizować wektory bazowe, na przykład:

które, napisane, rozwinięte,

Zwięzła notacja iloczynu krzyżowego, która upraszcza uogólnianie do nieortogonalnych współrzędnych i wyższych wymiarów, jest możliwa dzięki tensorze Levi-Civita , który będzie miał składowe inne niż zera i jedynki, jeśli wszystkie współczynniki skali nie są równe jeden.
Rachunek wektorowy
Różnicowanie
Patrząc na nieskończenie małe przemieszczenie od pewnego momentu, widać, że

Z definicji gradient funkcji musi spełniać (ta definicja pozostaje prawdziwa, jeśli ƒ jest dowolnym tensorem )

Wynika z tego, że operator del musi być:

i dzieje się tak w przypadku ogólnych współrzędnych krzywoliniowych. Wielkości takie jak gradient i Laplacen następują po prawidłowym zastosowaniu tego operatora.
Wzory wektorów bazowych
Z d r i znormalizowanej wektory ê I dodaje się może być wykonana.
| Element różnicowy
|
Wektory
|
Skalary
|
|
Element linii
|
Wektor styczny do współrzędnej krzywej q i :

|
Nieskończona długość

|
|
Element powierzchni
|
Normalna do współrzędnej powierzchni q k = stała:

|
Nieskończona powierzchnia

|
|
Element objętości
|
Nie dotyczy
|
Nieskończona objętość

|
gdzie

jest jakobian wyznacznik , która ma geometryczną interpretację odkształcenia objętości z nieskończenie kostki d x d y d Z do nieskończenie zakrzywioną objętości w układzie współrzędnych prostokątnych.
Integracja
Używając elementu liniowego pokazanego powyżej, całka krzywoliniowa po ścieżce wektora F wynosi:


Nieskończenie mały element pola powierzchni opisanej przez utrzymywanie jednej stałej współrzędnej q k to:

Podobnie element głośności to:

gdzie duży symbol Π (duża litera Pi ) oznacza produkt w taki sam sposób, jak duży Σ oznacza sumę. Zauważ, że iloczyn wszystkich czynników skali jest wyznacznikiem Jakobianu .
Na przykład całka powierzchniowa funkcji wektorowej F nad q 1 = stała powierzchnia w 3D wynosi:


Zauważ, że F 1 / h 1 jest składnikiem F normalnym do powierzchni.
Operatory różniczkowe w trzech wymiarach
Ponieważ te operacje są wspólne w aplikacji, wszystkie składniki wektora w tej sekcji są przedstawione w odniesieniu do znormalizowanej podstawy: .

| Operator
|
Wyrażenie
|
|
Gradient z pola skalarnego
|

|
|
Rozbieżność z pola wektorowego
|
![\nabla \cdot {\mathbf F}={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}} }\left(F_{1}h_{2}h_{3}\right)+{\frac {\partial }{\partial q^{2}}}\left(F_{2}h_{3}h_{ 1}\right)+{\frac {\częściowy }{\częściowy q^{3}}}\left(F_{3}h_{1}h_{2}\right)\right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/507074e0312d74f218fab31eb2c8b8f5b1f4c006)
|
|
Zawinięcie pola wektorowego
|
![{\begin{wyrównany}\nabla \times {\mathbf F}&={\frac {{\hat {{\mathbf e}}}_{1}}{h_{2}h_{3}}}\left [{\frac {\częściowy }{\częściowy q^{2}}}\left(h_{3}F_{3}\right)-{\frac {\częściowy }{\częściowy q^{3}}} \left(h_{2}F_{2}\right)\right]+{\frac {{\hat {{\mathbf e}}}_{2}}{h_{3}h_{1}}}\ left[{\frac {\partial }{\częściowe q^{3}}}\left(h_{1}F_{1}\right)-{\frac {\partial }{\częściowe q^{1}} }\left(h_{3}F_{3}\right)\right]\\[10pt]&+{\frac {{\hat {{\mathbf e}}}_{3}}{h_{1} h_{2}}}\left[{\frac {\częściowy }{\częściowy q^{1}}}\left(h_{2}F_{2}\right)-{\frac {\częściowy }{\ częściowe q^{2}}}\left(h_{1}F_{1}\right)\right]={\frac {1}{h_{1}h_{2}h_{3}}}{\begin {vmatrix}h_{1}{\kapelusz {{\mathbf {e}}}}_{1}&h_{2}{\kapelusz {{\mathbf {e}}}}_{2}&h_{3}{ \hat {{\mathbf {e}}}}_{3}\\{\dfrac {\partial }{\partial q^{1}}}&{\dfrac {\partial }{\partial q^{2 }}}&{\dfrac {\partial }{\partial q^{3}}}\\h_{1}F_{1}&h_{2}F_{2}&h_{3}F_{3}\end{ vmatrix}}\end{wyrównany}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f0cf253355fd6c635882210ba8aea0ce0a2ed69)
|
|
Laplace'a pola skalarnego
|
![\nabla ^{2}\phi ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}} \left({\frac {h_{2}h_{3}}{h_{1}}}{\frac {\częściowy \phi }{\częściowy q^{1}}}\right)+{\frac { \partial }{\częściowy q^{2}}}\left({\frac {h_{3}h_{1}}{h_{2}}}{\frac {\częściowy \phi }{\częściowy q^ {2}}}\right)+{\frac {\częściowy }{\częściowy q^{3}}}\left({\frac {h_{1}h_{2}}{h_{3}}}{ \frac {\częściowe \phi }{\częściowe q^{3}}}\prawo)\prawo]](https://wikimedia.org/api/rest_v1/media/math/render/svg/c36a46d097a001f5efcd7baeb71a704a4b7d12a7)
|
Powyższe wyrażenia można zapisać w bardziej zwięzłej formie za pomocą symbolu Levi-Civita i wyznacznika Jakobian , zakładając sumowanie nad powtarzającymi się indeksami:


| Operator
|
Wyrażenie
|
|
Gradient z pola skalarnego
|

|
|
Rozbieżność z pola wektorowego
|

|
|
Zawijanie się pola wektorowego (tylko 3D)
|

|
|
Laplace'a pola skalarnego
|

|
Zauważ również, że gradient pola skalarnego można wyrazić w postaci macierzy Jakobianu J zawierającej kanoniczne pochodne cząstkowe:
![{\ Displaystyle \ mathbf {J} = \ lewo [{\ Frac {\ częściowy \ phi} {\ częściowy q ^ {1}}} {\ Frac {\ częściowy \ phi} {\ częściowy q ^ {2}} },{\frac {\częściowy \phi }{\częściowy q^{3}}}\prawo]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b3d1780fdf3a08972f06460f5741be18d7bd6fe)
ze zmianą podstawy :

gdzie macierze rotacji i skalowania to:
![{\ Displaystyle \ mathbf {R} = [\ mathbf {e} _ {1}, \ mathbf {e} _ {2}, \ mathbf {e} _ {3}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28fd2e72b24c18b1b2b140ee915554865ec5c6a5)
![{\ Displaystyle \ mathbf {S} = \ operatorname {diag} ([h_ {1} ^ {-1}, h_ {2} ^ {-1}, h_ {3} ^ {-1}]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/974cf3b8344f1c1effd1f000b64a2ac21b104055)
Tabela współrzędnych ortogonalnych
Oprócz zwykłych współrzędnych kartezjańskich, poniżej zestawiono kilka innych. Notacja interwałowa jest używana dla zwartości w kolumnie współrzędnych.
| Współrzędne krzywoliniowe ( q 1 , q 2 , q 3 )
|
Transformacja z kartezjańskiego ( x , y , z )
|
Współczynniki skali
|
|
Sferyczne współrzędne biegunowe
![(r,\theta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )](https://wikimedia.org/api/rest_v1/media/math/render/svg/05f80374da8b4cc0a2a38db8d858474b585b0574)
|

|

|
|
Cylindryczne współrzędne biegunowe

|

|

|
|
Paraboliczne współrzędne cylindryczne

|

|

|
|
Współrzędne paraboliczne

|

|

|
|
Współrzędne paraboloidalne

|

gdzie

|

|
|
Współrzędne elipsoidalne

|

gdzie
|

|
|
Eliptyczne współrzędne cylindryczne

|

|

|
|
Wydłużone współrzędne sferoidalne
![(\xi ,\eta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )](https://wikimedia.org/api/rest_v1/media/math/render/svg/58c343b31aeed0f8843151e697f796a225a14491)
|

|

|
|
Spłaszczone współrzędne sferoidalne
![(\xi ,\eta ,\phi )\in [0,\infty )\times \left[-{\frac {\pi }{2}},{\frac {\pi }{2}}\right] \razy [0,2\pi )](https://wikimedia.org/api/rest_v1/media/math/render/svg/93628d06c8efe1c6f60365cc5f80f615c07bca13)
|

|

|
|
Dwubiegunowe współrzędne cylindryczne

|

|

|
|
Współrzędne toroidalne
![(u,v,\phi )\in (-\pi ,\pi ]\times [0,\infty )\times [0,2\pi )](https://wikimedia.org/api/rest_v1/media/math/render/svg/000c3d0efd5294a2c0d125ea8f4a1052147fc971)
|

|

|
|
Współrzędne bisferyczne
|

|

|
|
Współrzędne stożkowe

|

|

|
Zobacz też
Uwagi
Bibliografia
- Korn GA i Korn TM . (1961) Podręcznik matematyczny dla naukowców i inżynierów , McGraw-Hill, s. 164-182.
-
Morse'a i Feshbacha (1953). „Metody fizyki teoretycznej, tom 1”. McGraw-Hill.
- Margenau H. i Murphy GM. (1956) Matematyka Fizyki i Chemii , II. red., Van Nostrand, s. 172–192.
- Leonid P. Lebedev i Michael J. Cloud (2003) Analiza tensorów , s. 81 – 88.


