
Bieg -Gear



Koło zębate to obracająca się okrągła część maszyny z wyciętymi zębami lub, w przypadku koła zębatego lub koła zębatego , wstawionymi zębami (zwanymi zębatkami ), które zazębiają się z inną (kompatybilną) częścią zębatą w celu przeniesienia (przekształcenia) momentu obrotowego i prędkości. Podstawowa zasada działania przekładni jest analogiczna do podstawowej zasady dźwigni. Koło zębate może być również nieformalnie nazywane trybikiem . Urządzenia z przekładnią mogą zmieniać prędkość, moment obrotowy i kierunek źródła zasilania . Koła zębate o różnych rozmiarach wytwarzają zmianę momentu obrotowego, tworząc przewagę mechaniczną poprzez ich przełożenie , dzięki czemu mogą być uważane za prostą maszynę . Prędkości obrotowe i momenty obrotowe dwóch zazębiających się kół zębatych różnią się proporcjonalnie do ich średnic. Zęby obu zazębiających się kół zębatych mają ten sam kształt.
Co najmniej dwa zazębiające się koła zębate, pracujące w sekwencji, nazywane są przekładnią zębatą lub przekładnią . Koła zębate w skrzyni biegów są analogiczne do kół w układzie skrzyżowanych kół pasowych . Zaletą kół zębatych jest to, że zęby kół zębatych zapobiegają poślizgowi. W skrzyniach biegów z wieloma przełożeniami, takich jak rowery, motocykle i samochody, termin „przekładnia” (np. „pierwszy bieg”) odnosi się do przełożenia, a nie do rzeczywistego fizycznego biegu. Termin ten opisuje podobne urządzenia, nawet gdy przełożenie jest ciągłe, a nie dyskretne, lub gdy urządzenie faktycznie nie zawiera kół zębatych, jak w przypadku przekładni bezstopniowej .
Ponadto koło zębate może zazębiać się z liniową częścią zębatą, zwaną zębatką , powodując przesunięcie zamiast obrotu.
Historia
.jpg)
Wczesne przykłady przekładni pochodzą z IV wieku pne w Chinach (czasy Zhan Guo – późnowschodnia dynastia Zhou ), które zachowały się w Muzeum Luoyang w prowincji Henan w Chinach . Najwcześniejsze zachowane koła zębate w Europie zostały znalezione w mechanizmie z Antykithiry , który jest przykładem bardzo wczesnego i skomplikowanego urządzenia zębatego, zaprojektowanego do obliczania pozycji astronomicznych . Jego czas budowy szacuje się obecnie na okres od 150 do 100 lat p.n.e. Koła zębate pojawiają się w pracach związanych z Bohaterem Aleksandrii , w rzymskim Egipcie około 50 rne, ale można je wywieść z mechaniki szkoły aleksandryjskiej w Egipcie Ptolemejskim z III wieku p.n.e. PNE).

Przekładnia segmentowa, która odbiera/przesyła ruch posuwisto-zwrotny z/do koła zębatego, składająca się z wycinka koła zębatego/pierścienia kołowego z zębami na obwodzie, została wynaleziona przez arabskiego inżyniera Al-Dżazariego w 1206 roku. Przekładnia ślimakowa została wynaleziona w 1206 roku . Subkontynencie indyjskim , do użytku w odziarniarkach bawełny rolkowej , od pewnego czasu w XIII-XIV wieku. Mechanizmy różnicowe mogły być używane w niektórych chińskich rydwanach skierowanych na południe , ale pierwszy weryfikowalny mechanizm różnicowy został użyty przez brytyjskiego zegarmistrza Josepha Williamsona w 1720 roku.
Przykłady wczesnych zastosowań przekładni obejmują:
- 1386 CE: Zegar katedralny w Salisbury : jest to najstarszy na świecie wciąż działający mechaniczny zegar zębaty.
- c. XIII–XIV wiek: Przekładnia ślimakowa została wynaleziona jako część odziarniarki rolkowej na subkontynencie indyjskim .
- c. 1221 n.e. W Isfahanie zbudowano astrolabium z przekładnią, pokazujące położenie księżyca w zodiaku i jego fazę oraz liczbę dni od nowiu.
- c. 1206 CE: Al-Dżazari wynalazł przekładnię segmentową jako część urządzenia do podnoszenia wody.
- 725 CE: W Chinach zbudowano pierwsze mechaniczne zegary zębate .
- c. 200–265 n.e.: Ma Jun używał kół zębatych jako części rydwanu skierowanego na południe .
- II wiek p.n.e.: Mechanizm z Antykithiry
- W naturze: w tylnych łapach nimf skoczka Issus coleoptratus .
Etymologia
Słowo sprzęt pochodzi prawdopodobnie od staronordyckiego gørvi (liczba mnoga gørvar ) „odzież, sprzęt”, spokrewnione z gøra , gørva „robić, konstruować, budować; uporządkować, przygotować”, popularny czasownik w staronordyckim, „używany w wielu sytuacjach, od pisania książki po ubieranie mięsa”. W tym kontekście znaczenie „koła zębatego w maszynie” po raz pierwszy potwierdzono w latach 20. XX wieku; specyficzny sens mechaniczny „części, za pomocą których silnik komunikuje ruch” pochodzi z 1814 r.; konkretnie pojazdu (rower, samochód itp.) do 1888 roku.


Ząb to ząb na kole. Od średnioangielskiego cogge, ze staronordyckiego (porównaj norweski kugg ('cog'), szwedzki kugg , kugge ('cog, tooth')), z proto-germańskiego * kuggō (porównaj holenderski kogge (' cogboat '), niemiecki Kock ) , od Proto-indoeuropejskiego * gugā ('garb, piłka') (porównać litewski gugà ('głowica, garb, górka'), od SROKI * gēw- ('zginać się, łuk').Pierwszy używany c. 1300 w poczucie „koła z zębami lub zębami; koniec 14c., „ząb na kole”; koło zębate, początek 15c.
Historycznie zębatki były zębami wykonanymi z drewna, a nie z metalu, a koło zębate technicznie składało się z szeregu drewnianych zębów zębatych umieszczonych wokół koła wpuszczanego, przy czym każdy ząb tworzył rodzaj wyspecjalizowanego połączenia wpuszczanego i czopowego . Koło może być wykonane z drewna, żeliwa lub innego materiału. Drewniane zębatki były dawniej używane, gdy nie można było wyciąć dużych metalowych kół zębatych, gdy odlewany ząb nie miał nawet w przybliżeniu odpowiedniego kształtu lub rozmiar koła sprawiał, że produkcja była niepraktyczna.
Zęby były często wykonane z drewna klonowego . W 1967 Thompson Manufacturing Company z Lancaster w stanie New Hampshire nadal prowadziła bardzo aktywną działalność, dostarczając dziesiątki tysięcy klonowych zębów zębatych rocznie, głównie do użytku w papierniach i przemiałowniach , z których niektóre pochodzą sprzed ponad 100 lat. Ponieważ drewniane ząbki pełnią dokładnie tę samą funkcję, co odlewany lub obrabiany metalowy ząb, słowo to zostało zastosowane w obu przypadkach, a rozróżnienie zostało na ogół zagubione.
Porównanie z mechanizmami napędowymi
Określony stosunek, jaki zęby dają przekładniom, zapewnia przewagę nad innymi napędami (takimi jak napędy trakcyjne i paski klinowe ) w precyzyjnych maszynach, takich jak zegarki, które zależą od dokładnego stosunku prędkości. W przypadkach, w których kierowca i popychacz znajdują się blisko siebie, koła zębate mają również przewagę nad innymi napędami pod względem mniejszej liczby wymaganych części. Minusem jest to, że koła zębate są droższe w produkcji, a ich wymagania dotyczące smarowania mogą powodować wyższy koszt eksploatacji na godzinę.
Rodzaje
Przekładnie zewnętrzne i wewnętrzne

Zewnętrzne koło zębate to takie, w którym zęby uformowane są na zewnętrznej powierzchni cylindra lub stożka. Odwrotnie, wewnętrzne koło zębate to jedno z zębami utworzonymi na wewnętrznej powierzchni cylindra lub stożka. W przypadku kół zębatych stożkowych , wewnętrzne koło zębate to takie, którego kąt pochylenia przekracza 90 stopni. Koła zębate wewnętrzne nie powodują zmiany kierunku wału wyjściowego.
Ostroga

Koła zębate walcowe lub koła zębate proste to najprostszy rodzaj przekładni. Składają się z cylindra lub tarczy z promieniowo wystającymi zębami. Chociaż zęby nie są proste (ale zwykle mają specjalny kształt, aby osiągnąć stały przełożenie napędu, głównie ewolwentowe , ale rzadziej cykloidalne ), krawędź każdego zęba jest prosta i wyrównana równolegle do osi obrotu. Te koła zębate zazębiają się prawidłowo tylko wtedy, gdy są zamontowane na równoległych wałach. Obciążenia zębów nie powodują nacisku osiowego. Koła zębate czołowe są doskonałe przy umiarkowanych prędkościach, ale wydają się być głośne przy dużych prędkościach.
Śrubowaty


Koła zębate śrubowe lub „na sucho stałe” oferują udoskonalenie w stosunku do kół zębatych walcowych. Krawędzie natarcia zębów nie są równoległe do osi obrotu, lecz ustawione pod kątem. Ponieważ koło zębate jest zakrzywione, kątowanie sprawia, że kształt zęba jest segmentem spirali . Koła zębate śrubowe mogą być zazębione w orientacji równoległej lub skrzyżowanej . Pierwsza odnosi się do sytuacji, gdy wały są do siebie równoległe; to jest najczęstsza orientacja. W tym ostatnim wały są nierównoległe, a w tej konfiguracji koła zębate są czasami nazywane „kołami skośnymi”.
Zagięte zęby zazębiają się bardziej stopniowo niż zęby kół zębatych walcowych, dzięki czemu pracują płynniej i ciszej. W przypadku równoległych śrubowych kół zębatych każda para zębów najpierw styka się w jednym punkcie po jednej stronie koła zębatego; ruchoma krzywa kontaktu następnie stopniowo narasta na powierzchni zęba do maksimum, a następnie cofa się, aż zęby zerwą kontakt w jednym punkcie po przeciwnej stronie. W kołach walcowych zęby nagle stykają się na linii styku na całej ich szerokości, powodując naprężenia i hałas. Koła zębate wydają charakterystyczny skowyt przy dużych prędkościach. Z tego powodu koła zębate walcowe są używane w zastosowaniach o niskiej prędkości oraz w sytuacjach, w których kontrola hałasu nie stanowi problemu, a koła zębate śrubowe są używane w aplikacjach o dużej prędkości, przenoszenia dużej mocy lub tam, gdzie ważne jest ograniczenie hałasu . Prędkość jest uważana za wysoką, gdy prędkość linii boiska przekracza 25 m/s.
Wadą przekładni śrubowych jest napór wypadkowy wzdłuż osi przekładni, który musi być przejmowany przez odpowiednie łożyska oporowe . Jednak ten problem można zamienić w zaletę, gdy stosuje się koło zębate w jodełkę lub podwójną śrubę , która nie ma nacisku osiowego - a także zapewnia samonastawność kół zębatych. Skutkuje to mniejszym naciskiem osiowym niż porównywalne koło zębate walcowe.
Drugą wadą kół zębatych śrubowych jest również większy stopień tarcia ślizgowego między zazębionymi zębami, często rozwiązywane za pomocą dodatków w smarze.
Skośne biegi
W przypadku konfiguracji „skrzyżowanej” lub „skośnej”, koła zębate muszą mieć ten sam kąt nacisku i normalny skok; jednak kąt spirali i ręczność mogą się różnić. Relacja między dwoma wałkami jest w rzeczywistości zdefiniowana przez kąt (kąty) spirali dwóch wałków i orientację, jak zdefiniowano:
- dla kół zębatych o tej samej ręczności,
- dla przekładni o przeciwnych kierunkach,


gdzie jest kąt spirali dla koła zębatego. Konfiguracja skrzyżowana jest mniej sprawna mechanicznie, ponieważ istnieje tylko punktowy kontakt między kołami zębatymi, podczas gdy w konfiguracji równoległej występuje kontakt liniowy.

Dość powszechnie, spiralne koła zębate są używane z kątem spirali jednego z ujemnym kątem spirali drugiego; taka para może być również określana jako mająca prawoskrętną i lewoskrętną spiralę o równych kątach. Dwa równe, ale przeciwne kąty dodają się do zera: kąt między wałkami wynosi zero — to znaczy wały są równoległe . Tam, gdzie suma lub różnica (jak opisano w powyższych równaniach) nie wynosi zero, wały są skrzyżowane . W przypadku wałów skrzyżowanych pod kątem prostym kąty linii śrubowej są takie same, ponieważ muszą się sumować do 90 stopni. (Tak jest w przypadku kół zębatych na powyższej ilustracji: zazębiają się one prawidłowo w konfiguracji skrzyżowanej: w konfiguracji równoległej jeden z kątów spirali powinien zostać odwrócony. Przedstawione koła zębate nie mogą zazębiać się z wałami równoległymi.)
- Animacja 3D kół zębatych śrubowych (oś równoległa)
- Animacja 3D kół zębatych śrubowych (oś skrzyżowana)
Podwójna spirala
.jpg)
Podwójne koła zębate śrubowe przezwyciężają problem nacisku osiowego powodowany przez pojedyncze koła śrubowe poprzez zastosowanie podwójnego zestawu zębów, pochylonych w przeciwnych kierunkach. Podwójne koło zębate śrubowe można traktować jako dwa lustrzane koła zębate śrubowe zamontowane blisko siebie na wspólnej osi. Ten układ anuluje wypadkowy nacisk osiowy, ponieważ każda połowa koła zębatego naciska w przeciwnym kierunku, co daje wypadkową siłę osiową równą zero. Ten układ może również wyeliminować potrzebę łożysk oporowych. Jednak podwójne koła zębate śrubowe są trudniejsze do wykonania ze względu na ich bardziej skomplikowany kształt.
Koła zębate w jodełkę to specjalny rodzaj kół zębatych śrubowych. Nie mają rowka w środku, jak niektóre inne podwójne koła zębate śrubowe; dwa lustrzane koła zębate śrubowe są połączone tak, że ich zęby tworzą kształt litery V. Można to również zastosować do kół zębatych stożkowych , jak w przekładni głównej Citroëna Typ A.
Dla obu możliwych kierunków obrotu istnieją dwa możliwe układy przeciwnie zorientowanych śrubowych kół zębatych lub powierzchni czołowych kół zębatych. Jeden układ nazywa się stabilny, a drugi niestabilny. W stabilnym układzie powierzchnie śrubowych kół zębatych są zorientowane tak, że każda siła osiowa jest skierowana w kierunku środka koła zębatego. W niestabilnym układzie obie siły osiowe są skierowane z dala od środka przekładni. W obu układach całkowita (lub netto ) siła osiowa na każdym biegu wynosi zero, gdy koła zębate są prawidłowo ustawione. Jeśli koła zębate ulegną niewspółosiowości w kierunku osiowym, niestabilny układ generuje siłę netto, która może prowadzić do demontażu przekładni zębatej, podczas gdy układ stabilny generuje siłę korygującą netto. Jeśli kierunek obrotów jest odwrócony, kierunek nacisków osiowych również ulega odwróceniu, przez co stabilna konfiguracja staje się niestabilna i odwrotnie.
Stabilne podwójne koła zębate śrubowe można bezpośrednio wymieniać na koła zębate walcowe bez potrzeby stosowania różnych łożysk.
Ukos


Koło zębate stożkowe ma kształt okrągłego stożka z odciętą większą częścią końcówki . Kiedy dwa koła zębate stożkowe zazębiają się, ich wyimaginowane wierzchołki muszą zajmować ten sam punkt. Ich osie wałów również przecinają się w tym miejscu, tworząc dowolny nieprosty kąt między wałami. Kąt między wałami może wynosić dowolny z wyjątkiem zera lub 180 stopni. Koła zębate stożkowe o równej liczbie zębów i osi wału pod kątem 90 stopni nazywane są kołami zębatymi ukośnymi (USA) lub ukośnymi (Wielka Brytania).
Skosy spiralne

Spiralne koła zębate stożkowe mogą być produkowane jako typ Gleason (łuk kołowy ze stałą głębokością uzębienia), typ Oerlikon i Curvex (łuk kołowy ze stałą głębokością uzębienia), cyklo-palloid Klingelnberg (epicykloid ze stałą głębokością uzębienia) lub palloid Klingelnberg. Spiralne koła zębate stożkowe mają te same zalety i wady w stosunku do swoich prostoliniowych kuzynów, co koła zębate śrubowe z kołami walcowymi. Proste przekładnie stożkowe są zwykle używane tylko przy prędkościach poniżej 5 m/s (1000 ft/min) lub, w przypadku małych przekładni, 1000 obr./min
Uwaga: walcowy profil zęba koła zębatego odpowiada ewolwacie, natomiast profil zęba koła stożkowego odpowiada ośmiokątowi. Wszystkie tradycyjne generatory kół zębatych stożkowych (takie jak Gleason, Klingelnberg, Heidenreich & Harbeck, WMW Modul) produkują koła zębate stożkowe o ośmiokątnym profilu zębów. WAŻNE: W przypadku 5-osiowych frezowanych zestawów kół zębatych stożkowych ważne jest, aby wybrać te same obliczenia / układ, co w przypadku konwencjonalnej metody produkcji. Uproszczone obliczone stożkowe koła zębate na podstawie równoważnego koła walcowego w normalnym przekroju z ewolwentowym kształtem zęba wykazują odbiegający kształt zęba o zmniejszonej wytrzymałości zęba o 10-28% bez przesunięcia i 45% z przesunięciem [Diss. Hünecke, TU Drezno]. Ponadto „zestawy kół zębatych stożkowych ewolwentowych” powodują więcej hałasu.
Hipoidalny

Hipoidalne koła zębate przypominają spiralne koła zębate stożkowe, z wyjątkiem tego, że osie wału nie przecinają się. Powierzchnie podziałowe wydają się stożkowe, ale, aby skompensować przesunięcie wału, są w rzeczywistości hiperboloidami obrotowymi . Przekładnie hipoidalne są prawie zawsze zaprojektowane do pracy z wałami pod kątem 90 stopni. W zależności od tego, po której stronie wałek jest przesunięty, w stosunku do kąta ustawienia zębów, kontakt między zębami hipoidalnego koła zębatego może być jeszcze gładszy i bardziej stopniowy niż w przypadku spiralnych zębów stożkowych, ale może również działać ślizgowo wzdłuż zazębiających się zębów podczas obracania i dlatego zwykle wymagają niektórych najbardziej lepkich rodzajów oleju przekładniowego, aby uniknąć wyciskania go z współpracujących powierzchni zębów, olej jest zwykle oznaczany HP (od hipoidu), po którym następuje liczba oznaczająca lepkość. Ponadto zębnik może być zaprojektowany z mniejszą liczbą zębów niż zębnik ze stożkiem spiralnym, dzięki czemu możliwe jest uzyskanie przełożeń 60:1 i wyższych przy użyciu jednego zestawu hipoidalnych kół zębatych. Ten rodzaj przekładni jest najczęściej spotykany w układach napędowych pojazdów silnikowych, w połączeniu z mechanizmem różnicowym . Podczas gdy zwykły (niehipoidalny) zestaw kół zębatych z pierścieniem i zębnikiem nadaje się do wielu zastosowań, nie jest idealny do układów napędowych pojazdów, ponieważ generuje więcej hałasu i wibracji niż hipoid. Wprowadzenie na rynek przekładni hipoidalnych do zastosowań masowych było udoskonaleniem inżynieryjnym lat 20. XX wieku.
Koło zębate

Koła zębate koronowe lub koła zębate stożkowe są szczególną formą koła zębatego stożkowego, którego zęby wystają pod kątem prostym do płaszczyzny koła; w swojej orientacji zęby przypominają punkty na koronie. Koło koronowe może dokładnie zazębiać się tylko z innym kołem zębatym stożkowym, chociaż czasami można zaobserwować, że koła koronowe zazębiają się z kołami walcowymi. Koło zębate koronowe jest również czasami zazębione z wychwytem , takim jak w zegarach mechanicznych.
Robak


Robaki przypominają śruby . Ślimak jest zazębiony ze ślimacznicą , która wygląda podobnie do koła zębatego czołowego .
Zestawy ślimakowo-przekładniowe to prosty i kompaktowy sposób na osiągnięcie wysokiego momentu obrotowego i przełożenia przy niskich prędkościach. Na przykład, przekładnie śrubowe są zwykle ograniczone do przełożeń mniejszych niż 10:1, podczas gdy zestawy ślimakowo-przekładniowe wahają się od 10:1 do 500:1. Wadą jest możliwość znacznego poślizgu, prowadzącego do niskiej wydajności.
Przekładnia ślimakowa to rodzaj przekładni śrubowej, ale jej kąt spirali jest zwykle dość duży (bliski 90 stopni), a jego korpus jest zwykle dość długi w kierunku osiowym. Te atrybuty nadają mu właściwości przypominające śrubę. Różnica między ślimakiem a przekładnią śrubową polega na tym, że co najmniej jeden ząb wytrzymuje pełny obrót wokół spirali. Jeśli tak się stanie, jest to „robak”; jeśli nie, to jest to „przekładnia śrubowa”. Robak może mieć tylko jeden ząb. Jeśli ten ząb utrzymuje się przez kilka zwojów wokół spirali, wydaje się, że dżdżownica, powierzchownie, ma więcej niż jeden ząb, ale w rzeczywistości widać ten sam ząb pojawiający się w odstępach wzdłuż dżdżownicy. Obowiązuje zwykła nomenklatura śrub: ślimak jednozębny nazywa się pojedynczym gwintem lub pojedynczym startem ; robak z więcej niż jednym zębem nazywany jest wielowątkowym lub wielokrotnym startem . Zazwyczaj nie podaje się kąta spirali ślimaka. Zamiast tego podany jest kąt wyprzedzenia równy 90 stopni minus kąt spirali.
W zestawie ślimakowo-przekładniowym ślimak może zawsze napędzać koło zębate. Jeśli jednak przekładnia spróbuje napędzać robaka, może się to udać lub nie. Zwłaszcza jeśli kąt natarcia jest mały, zęby przekładni mogą po prostu zablokować się na zębach ślimaka, ponieważ składowa siły obwodowa ślimaka nie jest wystarczająca do pokonania tarcia. W tradycyjnych pozytywkach jednak przekładnia napędza ślimak, który ma duży kąt spirali. Siatka ta napędza łopatki ogranicznika prędkości zamontowane na wale ślimakowym.
Zestawy ślimakowo-przekładniowe, które się blokują, nazywane są samoblokującymi , co można wykorzystać z korzyścią, na przykład, gdy pożądane jest ustawienie pozycji mechanizmu poprzez obrócenie ślimaka, a następnie utrzymanie mechanizmu w tej pozycji. Przykładem jest głowica maszyny znajdująca się w niektórych typach instrumentów strunowych .
Jeśli przekładnia w zestawie ślimakowo-przekładniowym jest zwykłą przekładnią śrubową, osiągany jest tylko jeden punkt styku. Jeśli pożądane jest przenoszenie mocy od średniej do dużej, kształt zęba koła zębatego jest modyfikowany, aby uzyskać bliższy kontakt, dzięki czemu oba koła zębate częściowo otaczają się nawzajem. Odbywa się to poprzez wykonanie zarówno wklęsłych, jak i połączenie ich w punkcie siodła ; nazywa się to napędem stożkowym lub „podwójną kopertą”.
Przekładnie ślimakowe mogą być prawo lub leworęczne, zgodnie z długoletnią praktyką dotyczącą gwintów śrubowych.
Nieokrągły

Koła zębate nieokrągłe są przeznaczone do specjalnych celów. Podczas gdy zwykła przekładnia jest zoptymalizowana do przenoszenia momentu obrotowego na inny zaangażowany element przy minimalnym hałasie i zużyciu oraz maksymalnej wydajności , głównym celem przekładni nieokrągłej mogą być zmiany przełożenia , oscylacje przemieszczenia osi i inne. Typowe zastosowania obejmują maszyny tekstylne, potencjometry i przekładnie bezstopniowe .
Zębatka i zębnik

Zębatka to listwa zębata lub pręt, który można traktować jako koło zębate o nieskończenie dużym promieniu krzywizny . Moment obrotowy można zamienić na siłę liniową przez zazębienie zębatki z kołem zębatym zwanym zębnikiem : zębnik obraca się, podczas gdy zębatka porusza się w linii prostej. Taki mechanizm jest używany w samochodach do zamiany obrotu kierownicy na ruch drążków kierowniczych z lewej na prawą stronę .
Zębatki występują również w teorii geometrii kół zębatych, gdzie np. można określić kształt zęba wymiennego zestawu kół zębatych (nieskończony promień), z którego następnie wyprowadza się kształty zębów dla kół zębatych o określonych rzeczywistych promieniach . Typ przekładni zębatej i zębnika jest również stosowany w kolejach zębatych .
Przekładnia planetarna

W przekładni planetarnej porusza się jedna lub więcej osi przekładni. Przykładami są przekładnie słoneczne i planetarne (patrz poniżej), napęd cykloidalny , automatyczne skrzynie biegów i mechaniczne mechanizmy różnicowe .
Słońce i planeta

Przekładnie słoneczne i planetarne to metoda zamiany ruchu posuwisto-zwrotnego na ruch obrotowy stosowaną w silnikach parowych . James Watt używał go w swoich wczesnych silnikach parowych, aby obejść patent na korbę , ale zapewniał również korzyść polegającą na zwiększeniu prędkości koła zamachowego, dzięki czemu Watt mógł użyć lżejszego koła zamachowego.
Na ilustracji słońce jest żółte, planeta czerwona, ramię wykonujące ruch posuwisto-zwrotny jest niebieskie, koło zamachowe jest zielone, a wał napędowy jest szary.
Przekładnia harmoniczna

Przekładnia harmoniczna lub przekładnia falowa to wyspecjalizowany mechanizm przekładni często stosowany w przemysłowej kontroli ruchu , robotyce i lotnictwie ze względu na swoje zalety w porównaniu z tradycyjnymi systemami przekładni, w tym brak luzu, zwartość i wysokie przełożenia.
Chociaż schemat nie pokazuje prawidłowej konfiguracji, jest to „koło zębate rozrządu”, konwencjonalnie z dużo większą liczbą zębów niż tradycyjne koło zębate, aby zapewnić wyższy stopień precyzji.
Sprzęt klatkowy

Przekładnia klatkowa , zwana także kołem zębatym latarni lub zębnikiem latarni , ma cylindryczne pręty na zęby, równoległe do osi i ułożone wokół niego, podobnie jak pręty na okrągłej klatce dla ptaków lub latarni. Zespół jest utrzymywany razem przez tarcze na każdym końcu, w których osadzone są pręty zębate i oś. Przekładnie klatkowe są bardziej wydajne niż pełne koła zębate, a brud może wpaść przez pręty, zamiast zatykać się i zwiększać zużycie. Można je konstruować za pomocą bardzo prostych narzędzi, ponieważ zęby nie są formowane przez cięcie lub frezowanie, ale raczej przez wiercenie otworów i wkładanie prętów.
Czasami używany w zegarach, przekładnia klatkowa powinna być zawsze napędzana kołem zębatym, a nie używanym jako napęd. Sprzęt klatkowy początkowo nie był faworyzowany przez konserwatywnych producentów zegarów. Stał się popularny w zegarach wieżowych, w których najczęstsze były brudne warunki pracy. Często używano ich w krajowych amerykańskich mechanizmach zegarowych.
Przekładnia cykloidalna
Przekładnia magnetyczna
Wszystkie koła zębate każdego elementu przekładni magnetycznej działają jak magnes stały z okresowymi naprzemiennymi biegunami magnetycznymi na współpracujących powierzchniach. Elementy przekładni są montowane z luzem podobnym do innych przekładni mechanicznych. Chociaż nie mogą wywierać tak dużej siły jak tradycyjna przekładnia ze względu na ograniczenia natężenia pola magnetycznego, takie przekładnie działają bezdotykowo, a więc są odporne na zużycie, mają bardzo niski poziom hałasu, brak strat mocy na skutek tarcia i mogą się ślizgać bez uszkodzeń, co czyni je bardzo niezawodnymi . Mogą być stosowane w konfiguracjach, które nie są możliwe dla przekładni, które muszą się fizycznie stykać i mogą pracować z niemetalową barierą całkowicie oddzielającą siłę napędową od obciążenia. Sprzęgło magnetyczne może przenosić siłę do hermetycznie zamkniętej obudowy bez użycia promieniowego uszczelnienia wału , które może przeciekać.
Nomenklatura
Ogólny

- Częstotliwość obrotowa , n
- Mierzone w obrotach w czasie, takie jak obroty na minutę (RPM lub rpm).
- Częstotliwość kątowa , ω
- Mierzone w radianach/sekundę . 1 obr/min = 2π rad/minutę = π/30 rad/sekundę.
- Liczba zębów, N
- Ile zębów ma koło zębate, liczba całkowita . W przypadku robaków jest to liczba początków wątków, jaką ma robak.
- Koło zębate
- Większy z dwóch współpracujących kół zębatych lub sam bieg.
- Wałek zębaty
- Mniejszy z dwóch współpracujących kół zębatych.
- Ścieżka kontaktu
- Ścieżka, po której następuje punkt kontaktu między dwoma zazębiającymi się zębami koła zębatego.
- Linia działania, linia ciśnieniowa
- Linia, wzdłuż której skierowana jest siła między dwoma zazębionymi zębami koła zębatego. Ma ten sam kierunek, co wektor siły. Ogólnie rzecz biorąc, linia działania zmienia się z chwili na chwilę w okresie zazębienia pary zębów. Jednak w przypadku kół zębatych ewolwentowych siła między zębami jest zawsze skierowana wzdłuż tej samej linii — to znaczy linia działania jest stała. Oznacza to, że w przypadku ewolwentowych kół zębatych ścieżka kontaktu jest również linią prostą, zbieżną z linią działania — tak jak w rzeczywistości.
- Oś
- oś obrotu przekładni; linia środkowa wału.
- Punkt skoku
- Punkt, w którym linia działania przecina linię łączącą dwie osie przekładni.
- Koło podziałowe, linia podziałowa
- Okrąg wyśrodkowany i prostopadły do osi, przechodzący przez punkt podziałowy. Wstępnie zdefiniowana pozycja średnicy na kole zębatym, w której zdefiniowana jest grubość kolistego zęba, kąt nacisku i kąty spirali.
- Średnica podziałowa, d
- Wstępnie zdefiniowana pozycja średnicy na kole zębatym, w której zdefiniowana jest grubość kolistego zęba, kąt nacisku i kąty spirali. Standardowa średnica podziałowa jest wymiarem projektowym i nie może być zmierzona, ale jest miejscem, w którym wykonywane są inne pomiary. Jego wartość jest oparta na liczbie zębów ( N ), module normalnym ( m n ; lub normalnym skoku średnicowym, P d ) oraz kącie spirali ( ):
- w jednostkach metrycznych lub imperialnych.



- Moduł lub moduł, m
- Ponieważ obliczanie podziałki kołowej za pomocą liczb niewymiernych jest niepraktyczne , inżynierowie mechanicy zwykle używają współczynnika skalowania, który zastępuje go wartością regularną. Jest to znane jako moduł lub moduł koła i jest po prostu zdefiniowane jako:
- gdzie m jest modułem, a p skokiem kołowym. Jednostkami modułu są zwykle milimetry ; Moduł angielski jest czasami używany z jednostkami cali . Gdy podziałka średnicowa, DP, jest w jednostkach angielskich,
- w konwencjonalnych jednostkach metrycznych.
- Odległość między dwiema osiami staje się:
- gdzie a to odległość osi, z 1 iz 2 to liczba zębów (zębów) dla każdego z dwóch kół (przekładni). Liczby te (lub przynajmniej jedna z nich) są często wybierane spośród liczb pierwszych , aby stworzyć równy kontakt między każdym trybem obu kół, a tym samym uniknąć niepotrzebnego zużycia i uszkodzeń. Równomierne równomierne zużycie kół zębatych uzyskuje się poprzez zapewnienie, że liczba zębów dwóch zazębiających się ze sobą kół zębatych jest względem siebie względnie pierwszorzędna ; dzieje się tak, gdy największy wspólny dzielnik (GCD) każdej liczby zębów koła zębatego wynosi 1, np. GCD(16,25)=1; jeśli pożądane jest przełożenie 1:1, między dwa koła zębate można wstawić stosunkowo główne koło zębate; utrzymuje to przełożenie 1:1, ale odwraca kierunek biegu; można również wstawić drugie stosunkowo główne koło zębate, aby przywrócić pierwotny kierunek obrotu, przy jednoczesnym zachowaniu równomiernego zużycia wszystkich 4 kół zębatych w tym przypadku. Inżynierowie mechanicy, przynajmniej w Europie kontynentalnej, zwykle używają modułu zamiast okrągłego podziału. Moduł, podobnie jak podziałka kołowa, może być stosowany do wszystkich typów trybów, a nie tylko prostych trybów ewolucyjnych .
- Robocze średnice podziałowe
- Średnice określane na podstawie liczby zębów i rozstawu osi, przy której pracują koła zębate. Przykład dla zębnika:




- Powierzchnia boiska
- W przekładniach cylindrycznych cylinder utworzony przez rzut koła podziałowego w kierunku osiowym. Mówiąc bardziej ogólnie, powierzchnia utworzona przez sumę wszystkich okręgów podziałowych podczas ruchu wzdłuż osi. W przypadku kół zębatych stożkowych jest to stożek.
- Kąt działania
- Kąt z wierzchołkiem w środku koła zębatego, jedna noga w punkcie, w którym współpracujące zęby stykają się po raz pierwszy, a druga noga w punkcie, w którym zęby się rozłączają.
- Łuk działania
- Odcinek koła podziałowego zależny od kąta działania.
- Kąt nacisku ,
- Dopełnienie kąta między kierunkiem, w którym zęby wywierają na siebie siłę, a linią łączącą środki dwóch kół zębatych. W przypadku kół zębatych ewolwentowych zęby zawsze wywierają siłę wzdłuż linii działania, która w przypadku kół zębatych ewolwentowych jest linią prostą; a zatem dla kół zębatych ewolwentowych kąt nacisku jest stały.
- Średnica zewnętrzna,
- Średnica koła zębatego mierzona od wierzchołków zębów.
- Średnica korzenia
- Średnica koła zębatego mierzona u podstawy zęba.
- Dodatek, a
- Odległość promieniowa od powierzchni podziałki do najbardziej wysuniętego na zewnątrz punktu zęba.
- Dedendum, b
- Odległość promieniowa od głębokości koryta zęba do powierzchni boiska.
- Cała głębokość,
- Odległość od wierzchołka zęba do korzenia; jest równy addendum plus dedendum lub głębokości roboczej plus prześwit.
- Luz
- Odległość między kołem korzenia koła zębatego a kołem addendum jego partnera.
- Głębokość robocza
- Głębokość zazębienia dwóch biegów, czyli suma ich dodatków roboczych.
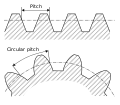
- Skok kołowy, p
- Odległość od jednej powierzchni zęba do odpowiedniej powierzchni sąsiedniego zęba na tym samym kole zębatym, mierzona wzdłuż koła podziałowego.
- Skok średnicowy, DP
-
- Stosunek liczby zębów do średnicy podziałki. Może być mierzony w zębach na cal lub zębach na centymetr, ale konwencjonalnie ma jednostki średnicy na cal. Gdzie moduł, m, jest w jednostkach metrycznych
- w jednostkach angielskich







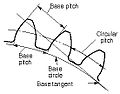
- Okrąg podstawowy
- W kołach ewolwentowych profil zęba jest generowany przez ewolwentę koła podstawowego. Promień koła podstawowego jest nieco mniejszy niż promień koła podziałowego
- ton podstawowy, ton normalny,
- W ewolwentowych kołach zębatych odległość od jednej powierzchni zęba do odpowiedniej powierzchni sąsiedniego zęba na tym samym kole zębatym, mierzona wzdłuż okręgu podstawowego
- Ingerencja
- Kontakt między zębami inny niż w zamierzonych częściach ich powierzchni
- Zestaw wymienny
- Zestaw kół zębatych, z których każda dobrze pasuje do każdej innej

Przekładnia śrubowa
- Kąt helisy,
- Kąt między styczną do spirali a osią koła zębatego. Jest to zero w granicznym przypadku przekładni czołowej, chociaż można to również uznać za kąt przeciwprostokątny.
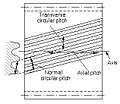
- Normalny skok kołowy,
- Skok kołowy w płaszczyźnie prostopadłej do zębów.
- Podziałka poprzeczna kołowa, p
- Skok kołowy w płaszczyźnie obrotu koła zębatego. Czasami nazywa się to po prostu „skokiem kołowym”.


Kilka innych parametrów helisy można wyświetlić w płaszczyźnie normalnej lub poprzecznej. Indeks dolny n zwykle wskazuje normalny.
Przekładnia ślimakowa
- Prowadzić
- Odległość od dowolnego punktu na nitce do odpowiedniego punktu na następnym obrocie tego samego wątku, mierzona równolegle do osi.
- podziałka liniowa, p
- Odległość od dowolnego punktu na wątku do odpowiedniego punktu na sąsiednim wątku, mierzona równolegle do osi. W przypadku ślimaka jednowątkowego skok i podziałka liniowa są takie same.
- Kąt wyprzedzenia,
- Kąt między styczną do helisy a płaszczyzną prostopadłą do osi. Zauważ, że dopełnienie kąta spirali jest zwykle podawane dla śrubowych kół zębatych.
- średnica podziałowa,
- Tak samo, jak opisano wcześniej na tej liście. Zwróć uwagę, że w przypadku ślimaka jest on nadal mierzony w płaszczyźnie prostopadłej do osi koła zębatego, a nie w pochylonej płaszczyźnie.


Indeks dolny w oznacza robaka, indeks dolny g oznacza bieg.
Kontakt zęba

Linia kontaktowa
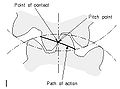
Ścieżka działania

Linia działania

Płaszczyzna działania
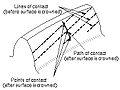
Linie styku (przekładnia śrubowa)

Łuk działania

Długość działania

Średnica graniczna
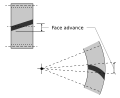
Zaliczka na twarz

Strefa działania










- Punktem kontaktowym
- Dowolny punkt, w którym dwa profile zębów stykają się ze sobą.
- Linia kontaktowa
- Linia lub krzywa, wzdłuż której dwie powierzchnie zębów są styczne do siebie.
- Ścieżka działania
- Miejsce kolejnych punktów styku między parą zębów koła zębatego w fazie zazębienia. W przypadku sprzężonych zębów przekładni ścieżka działania przechodzi przez punkt skoku. Jest to ślad powierzchni działania w płaszczyźnie obrotu.
- Linia działania
- Ścieżka działania dla kół zębatych ewolwentowych. Jest to linia prosta przechodząca przez punkt pochylenia i styczna do obu okręgów bazowych.
- Powierzchnia działania
- Wyimaginowana powierzchnia, w której dochodzi do kontaktu między dwiema współpracującymi powierzchniami zębów. Jest to podsumowanie ścieżek działania we wszystkich sekcjach zębów sprzęgających.
- Płaszczyzna działania
- Powierzchnia działania dla ewolwentowych, równoległych kół zębatych z zębami walcowymi lub śrubowymi. Jest styczna do cylindrów podstawy.
- Strefa działania (strefa kontaktu)
- W przypadku ewolwentowych, równoległych kół zębatych z zębami walcowymi lub śrubowymi jest to prostokątny obszar w płaszczyźnie działania ograniczony przez długość działania i efektywną szerokość czoła .
- Ścieżka kontaktu
- Krzywa na obu powierzchniach zęba, wzdłuż której występuje teoretyczny kontakt jednopunktowy podczas sprzęgania kół zębatych z powierzchniami wypukłymi lub kół zębatych, które normalnie sprzęgają się tylko z kontaktem jednopunktowym.
- Długość działania
- Odległość na linii działania, przez którą przesuwa się punkt styku podczas działania profilu zęba.
- Łuk działania, Q t
- Łuk koła podziałowego, przez który profil zęba przechodzi od początku do końca kontaktu z profilem współpracującym.
- Łuk podejścia, Q a
- Łuk koła podziałowego, przez który profil zęba przesuwa się od początku kontaktu do momentu, gdy punkt kontaktu dociera do punktu podziałowego.
- Łuk wnęki, Q r
- Łuk koła podziałowego, przez który profil zęba przesuwa się od kontaktu w punkcie podziałowym, aż do zakończenia kontaktu.
- Współczynnik kontaktu, mc , ε
- Liczba podziałek kątowych, o jaką obraca się powierzchnia zęba od początku do końca kontaktu. W prosty sposób można ją zdefiniować jako miarę średniej liczby zębów w kontakcie w okresie, w którym ząb wchodzi i wychodzi z kontaktu z współpracującą przekładnią.
- Współczynnik kontaktu poprzecznego, m p , ε α
- Stosunek kontaktu w płaszczyźnie poprzecznej. Jest to stosunek kąta działania do nachylenia kątowego. W przypadku kół zębatych ewolwentowych uzyskuje się go najbardziej bezpośrednio jako stosunek długości działania do skoku podstawowego.
- Współczynnik kontaktu powierzchni, m F , ε β
- Współczynnik kontaktu w płaszczyźnie osiowej lub stosunek szerokości czoła do podziałki osiowej. Dla kół zębatych stożkowych i hipoidalnych jest to stosunek posuwu czoła do skoku kołowego.
- Całkowity współczynnik kontaktu, m t , ε γ
- Suma współczynnika kontaktu poprzecznego i współczynnika kontaktu powierzchni.


- Zmodyfikowany współczynnik kontaktu, m o
- W przypadku kół zębatych stożkowych pierwiastek kwadratowy z sumy kwadratów współczynników kontaktu poprzecznego i czołowego.

- Średnica graniczna
- Średnica koła zębatego, na której linia działania przecina maksymalny (lub minimalny w przypadku wewnętrznego zębnika) okrąg dodatkowy współpracującego koła zębatego. Jest to również określane jako początek aktywnego profilu, początek kontaktu, koniec kontaktu lub koniec aktywnego profilu.
- Początek aktywnego profilu (SAP)
- Przecięcie średnicy granicznej i profilu ewolwenty.
- Zaliczka na twarz
- Odległość na okręgu podziałowym, przez którą ząb spiralny lub spiralny przemieszcza się od pozycji, w której kontakt rozpoczyna się na jednym końcu śladu zęba na powierzchni podziałki do pozycji, w której kontakt ustaje na drugim końcu.
Grubość zęba

Grubość zęba

Zależności grubości
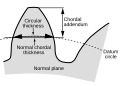
Grubość cięciwy

Pomiar grubości zębów na szpilkach

Pomiar rozpiętości

Długie i krótkie zęby addendum






- Grubość kołowa
- Długość łuku między dwoma stronami zęba koła zębatego na określonym okręgu odniesienia .
- Poprzeczna grubość kołowa
- Grubość kołowa w płaszczyźnie poprzecznej.
- Normalna grubość kołowa
- Grubość kołowa w płaszczyźnie normalnej. W przekładni śrubowej można to uznać za długość łuku wzdłuż normalnej linii śrubowej.
- Grubość osiowa
- W przekładniach śrubowych i ślimakach grubość zęba w przekroju osiowym przy standardowej średnicy podziałki.
- Podstawa okrągła grubość
- W zębach ewolwentowych, długość łuku na okręgu podstawowym pomiędzy dwiema krzywymi ewolwentowymi tworzącymi profil zęba.
- Normalna grubość cięciwy
- Długość cięciwy leżącej pod łukiem o grubości kołowej w płaszczyźnie normalnej do helisy podziałowej. Można wybrać dowolną dogodną średnicę pomiarową, niekoniecznie standardową średnicę podziałową.
- Dodatek akordowy (wysokość akordowa)
- Wysokość od wierzchołka zęba do cięciwy pod łukiem o grubości kołowej. Można wybrać dowolną dogodną średnicę pomiarową, niekoniecznie standardową średnicę podziałową.
- Zmiana profilu
- Przemieszczenie podstawowej linii odniesienia zębatki od cylindra odniesienia, wykonanego bezwymiarowo przez podzielenie przez normalny moduł. Służy do określenia grubości zęba, często przy zerowym luzie.
- Przesunięcie zębatki
- Przemieszczenie linii odniesienia narzędzia od cylindra odniesienia, wykonane bezwymiarowo przez podzielenie przez moduł normalny. Służy do określenia grubości zęba.
- Pomiar na szpilkach
- Pomiar odległości wykonywany na szpilce umieszczonej w przestrzeni zęba i powierzchni odniesienia. Powierzchnia odniesienia może być osią odniesienia koła zębatego, powierzchnią odniesienia lub jednym lub dwoma kołkami umieszczonymi w przestrzeni zęba lub przestrzeniami naprzeciw pierwszej. Pomiar ten służy do określenia grubości zęba.
- Pomiar rozpiętości
- Pomiar odległości na kilku zębach w normalnej płaszczyźnie. Dopóki urządzenie pomiarowe ma równoległe powierzchnie pomiarowe, które stykają się z niezmodyfikowaną częścią ewolwenty, pomiar odbywa się wzdłuż linii stycznej do cylindra podstawy. Służy do określania grubości zębów.
- Zmodyfikowane dodatkowe zęby
- Zęby zębatek sprzęgających, z których jedno lub oba mają niestandardowy dodatek.
- Zęby o pełnej głębokości
- Zęby, w których głębokość robocza wynosi 2.000 podzielone przez normalną podziałkę średnicową.
- Zęby krótkie
- Zęby, w których głębokość robocza jest mniejsza niż 2.000 podzielona przez normalną podziałkę średnicową.
- Równe zęby addendum
- Zęby, w których dwa sprzęgające koła zębate mają równe dodatki.
- Długie i krótkie zęby przydatkowe
- Zęby, w których dodatki dwóch sprzęgających kół zębatych są nierówne.
Poziom
Skok to odległość między punktem na jednym zębie a odpowiednim punktem na sąsiednim zębie. Jest to wymiar mierzony wzdłuż linii lub krzywej w kierunku poprzecznym, normalnym lub osiowym. Użycie pojedynczego skoku słowa bez zastrzeżenia może być niejednoznaczne iz tego powodu preferowane jest stosowanie określonych oznaczeń, takich jak poprzeczna podziałka kołowa, normalna podziałka podstawowa, podziałka osiowa.
Poziom
Skok zębów

Podstawowe relacje pitch
Główne stanowiska




- Skok kołowy, p
- Odległość łuku wzdłuż określonego okręgu podziałowego lub linii podziałowej między odpowiednimi profilami sąsiednich zębów.
- Poprzeczna podziałka kołowa, p t
- Skok kołowy w płaszczyźnie poprzecznej.
- Normalna podziałka kołowa, p n , p e
- Skok kołowy w normalnej płaszczyźnie, a także długość łuku wzdłuż normalnej helisy podziałowej między zębami lub gwintami śrubowymi.
- Skok osiowy, p x
- Skok liniowy w płaszczyźnie osiowej i na powierzchni skoku. W przekładniach śrubowych i ślimakach podziałka osiowa ma taką samą wartość na wszystkich średnicach. W przekładniach innych typów skok osiowy może być ograniczony do powierzchni skoku i może być pomiarem kołowym. Termin „skok osiowy” jest preferowany w porównaniu z terminem „skok liniowy”. Skok osiowy ślimaka śrubowego i skok kołowy jego przekładni ślimakowej są takie same.
- Normalny skok podstawowy, p N , p bn
- Ewolwentowe koło zębate śrubowe to podziałka podstawowa w normalnej płaszczyźnie. Jest to normalna odległość między równoległymi spiralnymi powierzchniami ewolwentowymi na płaszczyźnie działania w normalnej płaszczyźnie lub jest długością łuku na normalnej spirali bazowej. Jest to stała odległość w każdym śrubowym ewolwentowym kole zębatym.
- Poprzeczna podziałka podstawy, p b , p bt
- W biegu ewolwentowym boisko znajduje się na okręgu podstawowym lub wzdłuż linii działania. Odpowiadające boki zębów ewolwentowych są równoległymi krzywymi, a podziałka podstawy jest stałą i podstawową odległością między nimi wzdłuż wspólnej normalnej w płaszczyźnie poprzecznej.
- Skok średnicowy (poprzeczny), P d
- Stosunek liczby zębów do standardowej średnicy podziałki w calach.

- Normalny podział średnicowy, P nd
- Wartość skoku średnicowego w płaszczyźnie normalnej przekładni śrubowej lub ślimaka.

- Skok kątowy, θ N , τ
- Kąt określony przez podziałkę kołową, zwykle wyrażony w radianach.
- stopnie lub radiany


Reakcja
Luz to błąd w ruchu, który pojawia się, gdy biegi zmieniają kierunek. Istnieje, ponieważ zawsze istnieje pewna szczelina między tylną powierzchnią zęba napędowego a przednią powierzchnią zęba za nim na napędzanym kole zębatym i ta szczelina musi zostać zamknięta, zanim siła będzie mogła zostać przeniesiona w nowym kierunku. Termin „luz” może być również używany w odniesieniu do wielkości luki, a nie tylko do zjawiska, które powoduje; można więc mówić o parze kół zębatych, która ma np. „luz 0,1 mm”. Para kół zębatych mogłaby być zaprojektowana tak, aby miała zerowy luz, ale zakładałoby to perfekcję w produkcji, jednolitą charakterystykę rozszerzalności cieplnej w całym systemie i brak smaru. Dlatego pary kół zębatych są zaprojektowane tak, aby mieć pewien luz. Zwykle zapewnia się to poprzez zmniejszenie grubości zębów każdego koła zębatego o połowę żądanej odległości szczeliny. Jednak w przypadku dużego koła zębatego i małego zębnika luz jest zwykle całkowicie usuwany z koła zębatego, a zębnik otrzymuje pełnowymiarowe zęby. Luz można również uzyskać, przesuwając koła zębate dalej od siebie. Luz przekładni jest równy sumie luzów każdej pary kół zębatych, więc w długich pociągach luz może stać się problemem.
W sytuacjach wymagających precyzji, takich jak oprzyrządowanie i sterowanie, luz można zminimalizować za pomocą jednej z kilku technik. Na przykład koło zębate może być podzielone wzdłuż płaszczyzny prostopadłej do osi, jedna połowa jest przymocowana do wału w zwykły sposób, druga połowa jest umieszczona wzdłuż niej, swobodnie obracając się wokół wału, ale ze sprężynami między dwiema połówkami zapewniającymi względny moment obrotowy między nimi, dzięki czemu uzyskuje się w efekcie jedno koło zębate z rozprężnymi zębami. Inna metoda polega na zwężeniu zębów w kierunku osiowym i umożliwieniu ślizgania się przekładni w kierunku osiowym w celu uzyskania luzu.
Zmiana biegów
W niektórych maszynach (np. samochodach) konieczna jest zmiana przełożenia w celu dostosowania do zadania, proces znany jako zmiana biegów lub zmiana biegu. Istnieje kilka sposobów zmiany biegów, na przykład:
- Ręczna skrzynia biegów
- Automatyczna skrzynia
- Przerzutki , które w rzeczywistości są zębatkami w połączeniu z łańcuchem rolkowym
- Koła zębate w piaście (zwane również przekładniami planetarnymi lub przekładniami słonecznymi i planetarnymi)
Istnieje kilka skutków zmiany biegów w pojazdach silnikowych. W przypadku emisji hałasu pojazdu wyższy poziom hałasu emitowany jest, gdy pojazd jest włączony na niższych biegach. Żywotność konstrukcyjna kół zębatych o niższym przełożeniu jest krótsza, więc można zastosować tańsze koła zębate, które mają tendencję do generowania większego hałasu z powodu mniejszego współczynnika zachodzenia na siebie i mniejszej sztywności siatki itp. niż koła zębate śrubowe stosowane przy wysokich przełożeniach. Fakt ten był wykorzystywany do analizy dźwięku generowanego przez pojazdy od późnych lat 60. XX wieku i został włączony do symulacji hałasu na drogach miejskich i odpowiedniego projektu miejskich ekranów akustycznych wzdłuż jezdni.
Profil zęba

Profil przekładni czołowej
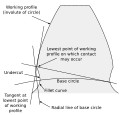
Podcięcie


Profil to jedna strona zęba w przekroju pomiędzy okręgiem zewnętrznym a okręgiem korzeniowym. Zazwyczaj profil jest krzywą przecięcia powierzchni zęba i płaszczyzny lub powierzchni normalnej do powierzchni podziałki, takiej jak płaszczyzna poprzeczna, normalna lub osiowa.
Krzywa zaokrąglenia (zaokrąglenie korzenia) to wklęsła część profilu zęba, gdzie łączy się z dnem przestrzeni zęba. 2
Jak wspomniano na początku artykułu, osiągnięcie niezmiennego stosunku prędkości zależy od profilu zębów. Tarcie i zużycie między dwoma biegami zależy również od profilu zęba. Istnieje wiele profili zębów, które zapewniają stałe stosunki prędkości. W wielu przypadkach, przy dowolnym kształcie zęba, możliwe jest opracowanie profilu zęba dla współpracującego koła zębatego, który zapewnia stały stosunek prędkości. Jednak w dzisiejszych czasach najczęściej stosuje się dwa profile zębów o stałej prędkości: cykloidalny i ewolwentowy . Cykloida była bardziej powszechna do końca XIX wieku. Od tego czasu ewolwenta w dużej mierze ją zastąpiła, szczególnie w zastosowaniach związanych z układem napędowym. Cykloida jest pod pewnymi względami bardziej interesującym i elastycznym kształtem; jednak ewolwenta ma dwie zalety: jest łatwiejsza w produkcji i umożliwia zmianę rozstawu kół zębatych w pewnym zakresie bez naruszania stałości stosunku prędkości. Przekładnie cykloidalne działają poprawnie tylko wtedy, gdy odległość między środkami jest dokładnie prawidłowa. Przekładnie cykloidalne są nadal używane w zegarach mechanicznych.
Podcięcie jest stanem w generowanych zębach kół zębatych, gdy dowolna część krzywej zaokrąglenia leży wewnątrz linii narysowanej stycznie do profilu roboczego w punkcie przecięcia się z zaokrągleniem. Podcięcie może być celowo wprowadzone w celu ułatwienia operacji wykończeniowych. Z podcięciem krzywa zaokrąglenia przecina profil roboczy. Bez podcięcia krzywa zaokrąglenia i profil roboczy mają wspólną styczną.
Materiały przekładni

Do produkcji kół zębatych wykorzystuje się liczne stopy metali nieżelaznych, żeliwa, metalurgię proszków i tworzywa sztuczne. Najczęściej jednak stosuje się stale ze względu na wysoki stosunek wytrzymałości do masy i niski koszt. Plastik jest powszechnie stosowany tam, gdzie problemem jest koszt lub waga. Prawidłowo zaprojektowana przekładnia z tworzywa sztucznego może w wielu przypadkach zastąpić stal, ponieważ ma wiele pożądanych właściwości, w tym tolerancję na zabrudzenia, niskie prędkości zazębienia, zdolność do dość dobrego „przeskakiwania” oraz możliwość wykonania z materiałów, które nie wymagają dodatkowego smarowania. Producenci używali plastikowych kół zębatych, aby obniżyć koszty produktów konsumenckich, w tym kserokopiarek, optycznych urządzeń pamięci masowej, tanich prądnic, konsumenckiego sprzętu audio, serwomotorów i drukarek. Kolejną zaletą stosowania tworzyw sztucznych, dawniej (np. w latach 80.), była redukcja kosztów napraw niektórych drogich maszyn. W przypadku silnego zacięcia (jak w przypadku papieru w drukarce) plastikowe zęby kół zębatych zostałyby oderwane od podłoża, umożliwiając następnie swobodne obracanie się mechanizmu napędowego (zamiast uszkadzania się poprzez naprężanie przed zacięciem). Dzięki zastosowaniu „protektorowych” zębów przekładni uniknięto zniszczenia znacznie droższego silnika i powiązanych części. W nowszych konstrukcjach metoda ta została zastąpiona przez zastosowanie sprzęgieł i silników z ograniczeniem momentu obrotowego lub prądu.
Stanowiska standardowe i system modułowy
Chociaż koła zębate mogą być wykonane z dowolnym podziałem, dla wygody i wymienności często stosuje się standardowe podziałki. Skok jest właściwością powiązaną z wymiarami liniowymi , a więc różni się, niezależnie od tego, czy wartości standardowe są podawane w systemie imperialnym (cale), czy w systemie metrycznym . Stosując pomiary w calach , wybierane są standardowe wartości podziałki średnicy z jednostkami „na cal”; podziałka średnicowa to liczba zębów na kole zębatym o średnicy podziałki jednego cala. Wspólne standardowe wartości dla kół zębatych walcowych to 3, 4, 5, 6, 8, 10, 12, 16, 20, 24, 32, 48, 64, 72, 80, 96, 100, 120 i 200. Niektóre standardowe podziałki, takie jak jako pomiary 1/10 i 1/20 cala, które zazębiają się z zębatką liniową, są w rzeczywistości (liniowymi) wartościami podziałki kołowej z jednostkami „cale”
Gdy wymiary kół zębatych są w systemie metrycznym, specyfikacja podziałki jest generalnie wyrażona w kategoriach modułu lub modułu , który jest w rzeczywistości pomiarem długości w poprzek średnicy podziałki . Pod pojęciem moduł rozumie się średnicę podziałki w milimetrach podzieloną przez liczbę zębów. Gdy moduł opiera się na pomiarach w calach, jest znany jako moduł angielski, aby uniknąć pomyłek z modułem metrycznym. Moduł jest wymiarem bezpośrednim, w przeciwieństwie do podziałki średnicowej, która jest wymiarem odwrotnym („gwinty na cal”). Zatem, jeśli średnica podziałowa koła zębatego wynosi 40 mm, a liczba zębów 20, moduł wynosi 2, co oznacza, że na każdy ząb przypada 2 mm średnicy podziałowej. Preferowane wartości standardowych modułów to 0,1, 0,2, 0,3, 0,4, 0,5, 0,6, 0,8, 1,0, 1,25, 1,5, 2,0, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20, 25, 32, 40 i 50.
Produkcja
Szacuje się, że od 2014 r. 80% wszystkich kół zębatych produkowanych na całym świecie jest wytwarzanych metodą formowania netto . Formowane koła zębate są zwykle wykonane z metalurgii proszków lub z tworzywa sztucznego. Wiele kół zębatych jest wykonywanych po opuszczeniu formy (w tym formowane wtryskowo koła zębate z tworzywa sztucznego i odlewane ciśnieniowo metalowe koła zębate), ale koła zębate z proszkowego metalu wymagają spiekania i odlewów piaskowych lub odlewy inwestycyjne wymagają cięcia kół zębatych lub innej obróbki w celu ich wykończenia. Najpopularniejszą formą skrawania kół zębatych jest frezowanie , ale istnieje również kształtowanie kół zębatych , frezowanie i przeciąganie . Druk 3D jako metoda produkcji szybko się rozwija. W przypadku metalowych kół zębatych w skrzyniach biegów samochodów osobowych i ciężarowych, zęby są poddawane obróbce cieplnej , aby były twarde i bardziej odporne na zużycie , pozostawiając rdzeń miękki i twardy . W przypadku dużych kół zębatych, które są podatne na wypaczanie, stosuje się prasę hartującą .
Model koła zębatego we współczesnej fizyce
Współczesna fizyka przyjęła model kół zębatych na różne sposoby. W XIX wieku James Clerk Maxwell opracował model elektromagnetyzmu , w którym linie pola magnetycznego były wirującymi rurkami nieściśliwego płynu. Maxwell użył koła zębatego i nazwał je „kołem jałowym”, aby wyjaśnić prąd elektryczny jako rotację cząstek w kierunkach przeciwnych do wirujących linii pola.
Niedawno fizyka kwantowa używa w swoim modelu „przekładni kwantowych”. Grupa kół zębatych może służyć jako model dla kilku różnych systemów, takich jak sztucznie skonstruowane urządzenie nanomechaniczne lub grupa cząsteczek pierścieniowych.
Hipoteza trzech fal porównuje dualność falowo-cząstkowa z przekładnią stożkową.
Mechanizm przekładni w świecie przyrody

Mechanizm zębaty był wcześniej uważany za wyłącznie sztuczny, ale już w 1957 roku zębatki zostały rozpoznane w tylnych łapach różnych gatunków skoczków , a naukowcy z University of Cambridge scharakteryzowali ich znaczenie funkcjonalne w 2013 roku, wykonując zdjęcia nimf z dużą prędkością. Issus coleoptratus na Uniwersytecie w Cambridge. Te koła zębate znajdują się tylko w formach nimf wszystkich skoczków i są tracone podczas ostatecznego wylinki do stadium dorosłego. U I. coleoptratus każda noga ma 400-mikrometrowy pasek zębów, promień podziałki 200 mikrometrów, z 10 do 12 w pełni zazębiającymi się zębami zębatymi typu czołowego, w tym zaokrąglonymi krzywiznami u podstawy każdego zęba, aby zmniejszyć ryzyko ścinania. Przegub obraca się jak mechaniczne koła zębate i synchronizuje tylne nogi Issusa, gdy przeskakuje w ciągu 30 mikrosekund, zapobiegając obracaniu się. Koła zębate nie są cały czas połączone. Jeden znajduje się na tylnych łapach każdego młodego owada, a gdy przygotowuje się do skoku, dwa zestawy zębów blokują się. W rezultacie nogi poruszają się niemal idealnie zgodnie, dając owadowi więcej mocy, gdy koła zębate obracają się do punktu zatrzymania, a następnie odblokowują.
Zobacz też
Bibliografia
Bibliografia
- McGraw-Hill (2007), Encyklopedia Nauki i Technologii McGraw-Hill (10 wyd.), McGraw-Hill Professional, ISBN 978-0-07-144143-8.
- Norton, Robert L. (2004), Projektowanie maszyn (3rd ed.), McGraw-Hill Professional, ISBN 978-0-07-121496-4.
- Vallance, Alex; Doughtie, Venton Levy (1964), Projektowanie elementów maszyn (wyd. 4), McGraw-Hill.
- Prasa przemysłowa (2012), Podręcznik maszynowy (wyd. 29.), ISBN 978-0-8311-2900-2
- Inżynierowie Edge, Gear Design i dane techniczne .
Dalsze czytanie
- Amerykańskie Stowarzyszenie Producentów Sprzętu ; American National Standards Institute (2005), Nomenklatura przekładni: definicje terminów z symbolami (wyd. ANSI/AGMA 1012-F90), American Gear Manufacturers Association, ISBN 978-1-55589-846-5.
- Buckingham, Earle (1949), Mechanika analityczna kół zębatych , McGraw-Hill Book Co..
- Coy, John J.; Townsend, Dennis P.; Zaretsky, Erwin V. (1985), Gearing (PDF) , Oddział Informacji Naukowej i Technicznej NASA, NASA-RP-1152 ; Raport techniczny AVSCOM 84-C-15.
- Kravchenko AI, Bovda AM Gear z sprzęgłem magnetycznym. Poklepać. Ukrainy N. 56700 – Bul. Nr 2, 2011 – F16H 49/00.
- Sclater, Neil. (2011). „Przekładnie: urządzenia, napędy i mechanizmy”. Podręcznik Mechanizmów i Urządzeń Mechanicznych. wyd. Nowy Jork: McGraw Hill. s. 131–174. ISBN 9780071704427 . Rysunki i projekty różnych przekładni.
- „Koła, które nie mogą się ślizgać”. Popular Science , luty 1945, s. 120–125.
Zewnętrzne linki
- Geararium. Muzeum kół zębatych i zębatych - antyczne i zabytkowe koła zębate, koła zębate, grzechotki i inne przedmioty związane z przekładniami.
- Kinematic Models for Design Digital Library (KMODDL) - filmy i zdjęcia setek działających modeli na Uniwersytecie Cornell
- Krótka relacja historyczna z zastosowania geometrii analitycznej do kształtu zębów kół zębatych
- Samouczek matematyczny dotyczący przekładni (związany z robotyką)
- Amerykańskie Stowarzyszenie Producentów Narzędzi
- Gear Technology, Journal of Gear Manufacturing